【源码】ConcurrentHashMap
1.7
构造器
segments最多只能有65536个 
每个segment中的hashMap大小默认是2 

计算出segment的数量和每个segment中hashMap的大小,我的理解其实就是hashMap的大小 * segment的数量要能放得下initialCapacity,hashMap的大小是先用initialCapacity / segment的数量再向上取整,然后再取2的幂次方。 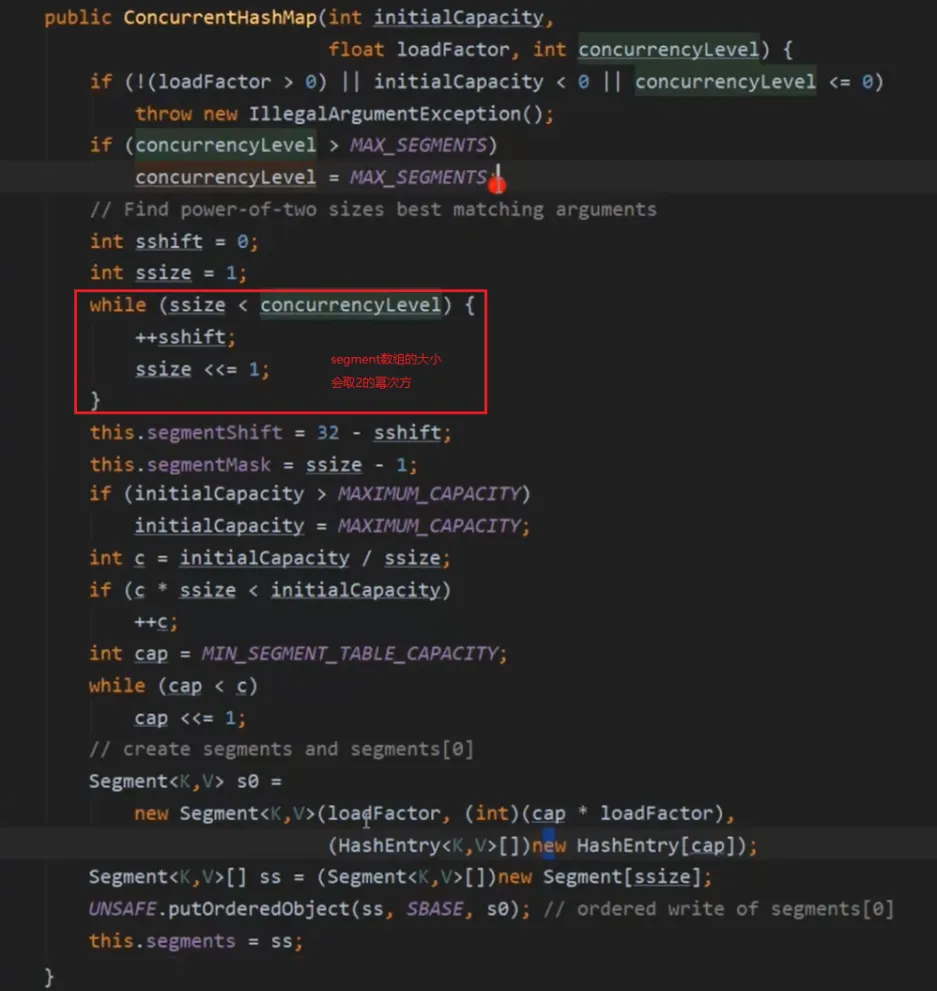
 之所以一开始要在0位置上初始化s0,是为了后面put的时候如果发现对应segment中的hashMap还没初始化,可以拿到s0的属性快速初始化一个hashMap
之所以一开始要在0位置上初始化s0,是为了后面put的时候如果发现对应segment中的hashMap还没初始化,可以拿到s0的属性快速初始化一个hashMap
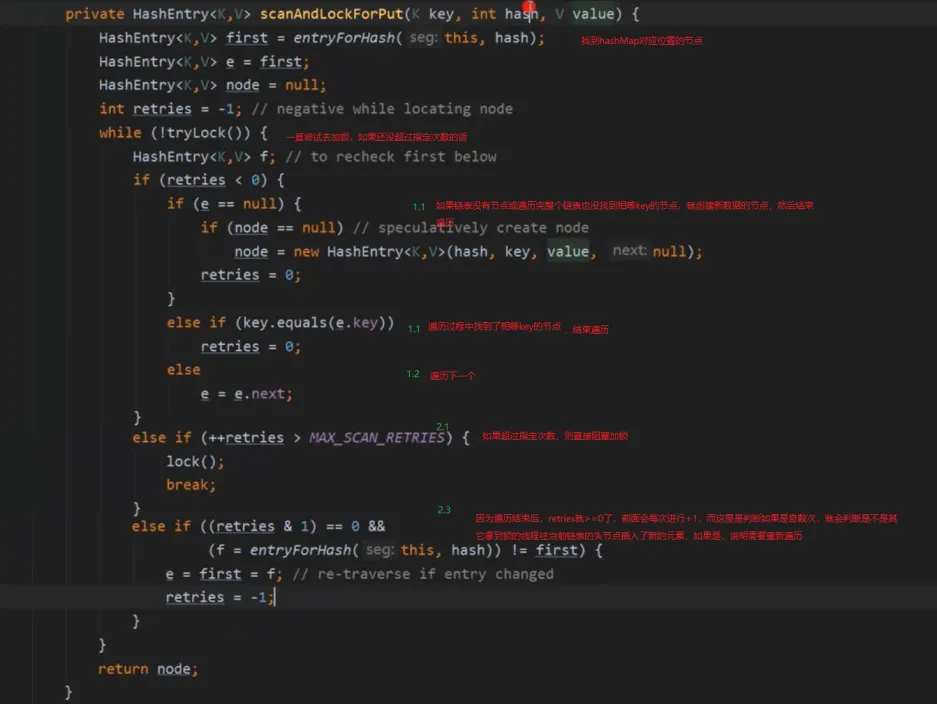
put
通过reentrantLock加锁控制线程安全 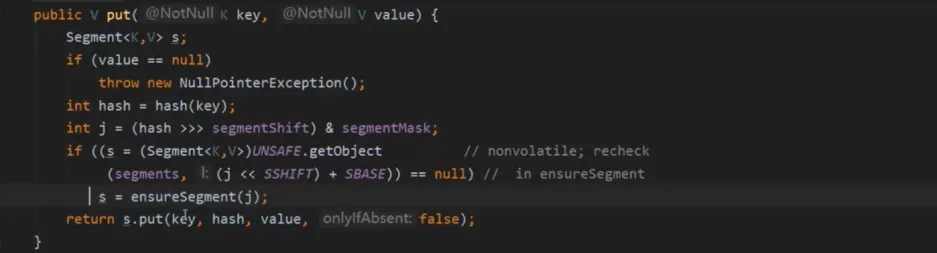
当对应位置的Segment为空时,调用ensureSegment进行初始化,初始化的时候,因为有可能会有多个线程同时来操作,所以通过cas控制将null更新为初始化的Segment,如果更新成功就退出,更新失败就自旋继续尝试将null更新为初始化的Segment,直到有人把null更新为初始化的Segment再退出 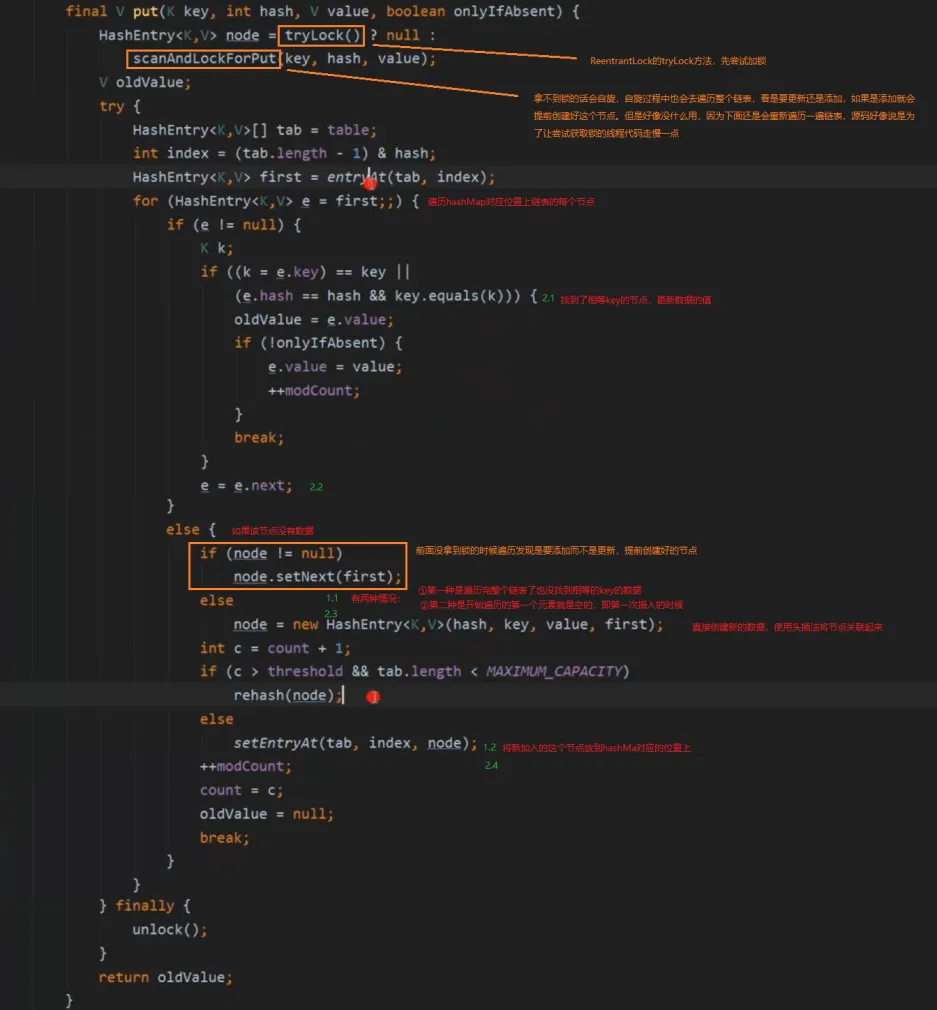
get
Segment中的hashmap通过volatile保证可见性,以及hashmap中的hashEntry的value和next都是通过volatile保证可见性 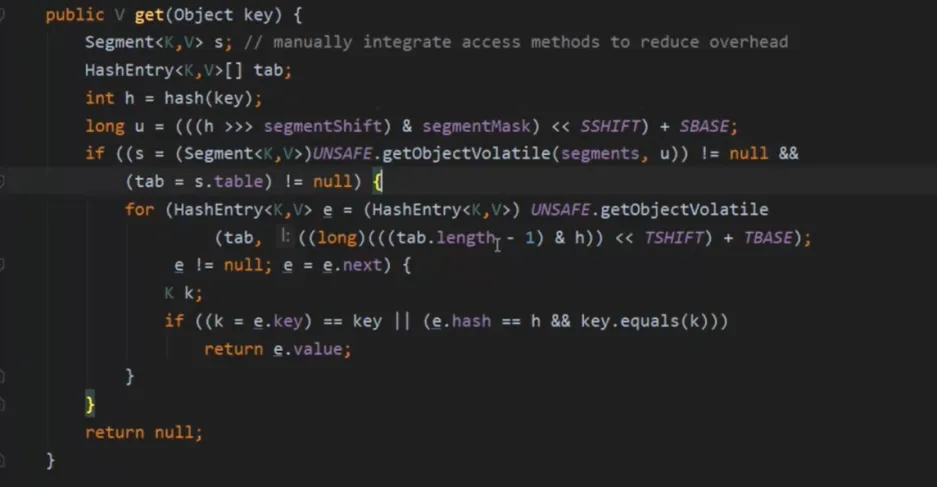
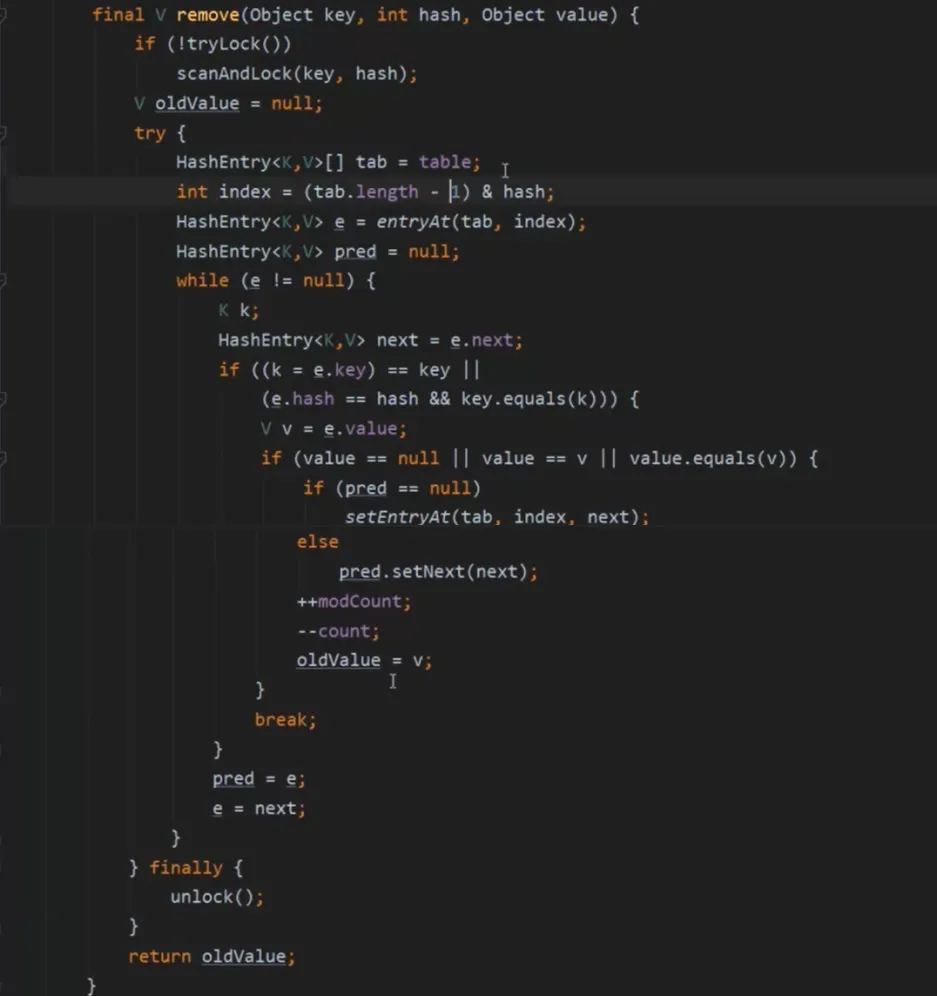
remove
通过reentrantLock加锁控制线程安全 
总结
更新操作:分段锁(ReentrantLock)+ CAS unsafe操作
查询操作:volatile
1.8
构造器


put
红黑树的结构是通过一个TreeBin类,在里面去维护一颗树,而1.8的HashMap是TreeNode类构造的红黑树,之所以用TreeBin包裹一颗红黑树,是因为红黑树的插入可能会涉及到节点的翻转,翻转就会导致加锁的根节点跟着变化,就有可能导致根节点变成了那个没有锁住的节点,这个时候别的线程就可以进来操作 
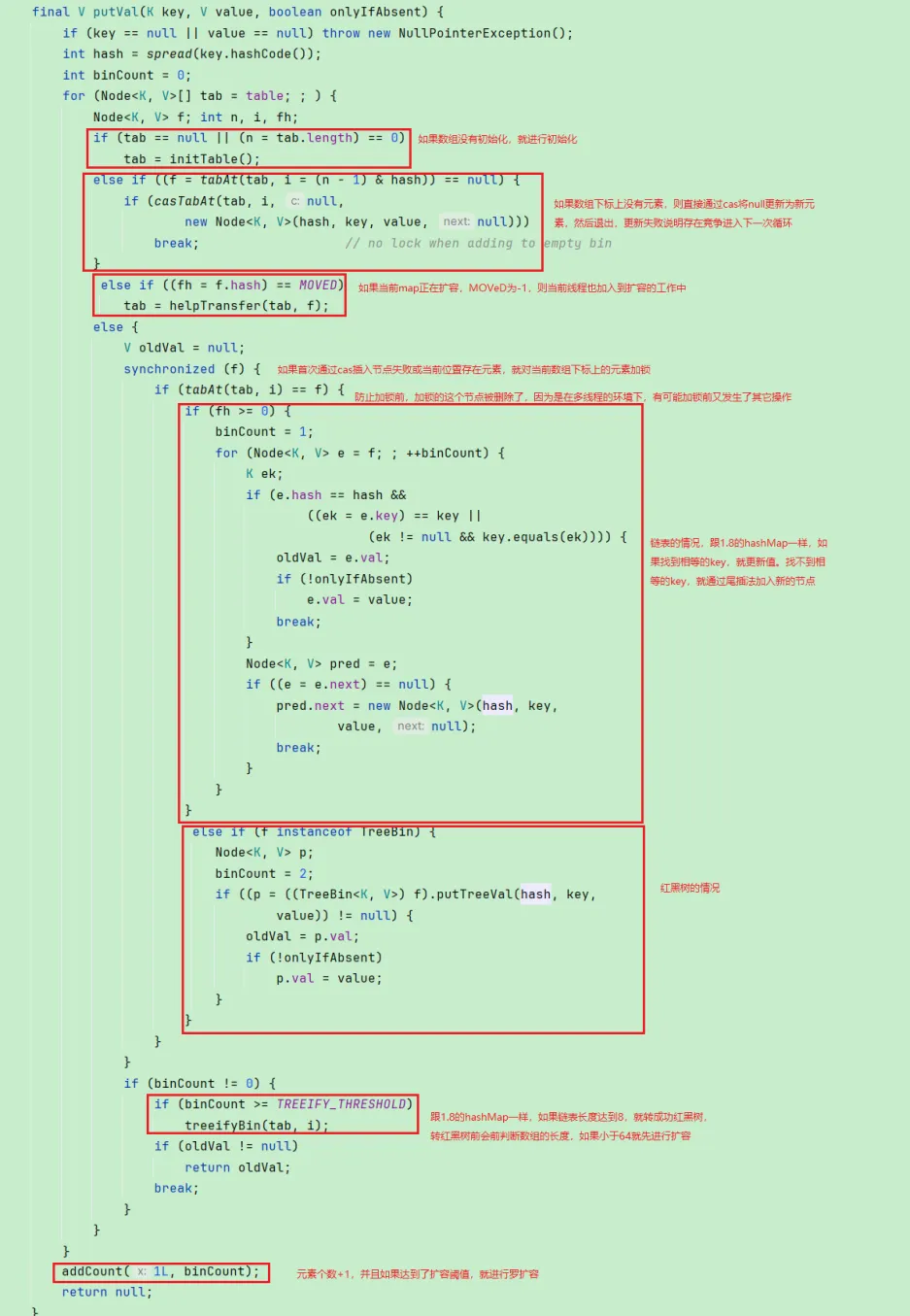
初始化数组,因为多线程环境存在同时初始化的情况,所以需要控制同步,这里采用的是cas,竞争资源是扩容因子sizeCtl,sizeCtl默认是0,通过cas将sizeCtl改为-1,如果改成功就进行初始化,并设置扩容因子,改失败的就一直调用Thread.yield,让出cpu进行自旋,直到这个map初始化好才退出 网上也有人提到有可能这里会出现cpu标高的问题,如果让出cpu的线程又拿到cpu的时间片,那就又会进行自旋下去,一直重复 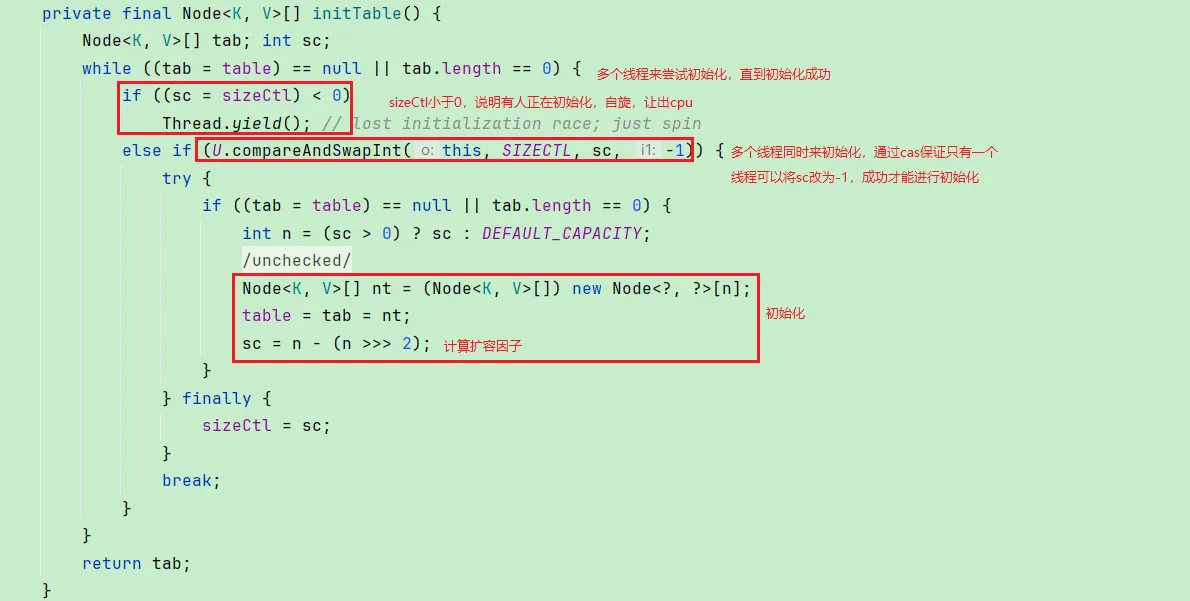 转红黑树
转红黑树 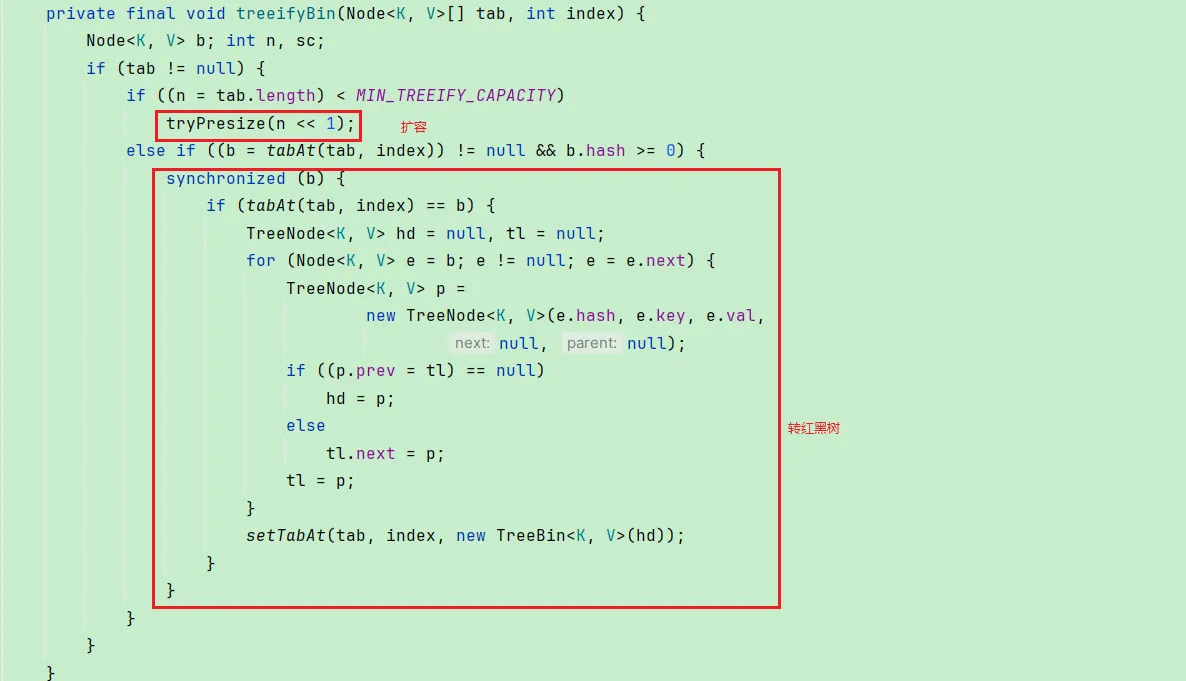
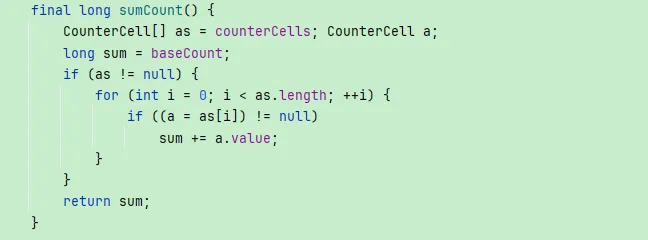
元素+1,采用的是类似LongAdder的原理,最后判断是否达到扩容阈值需要扩容 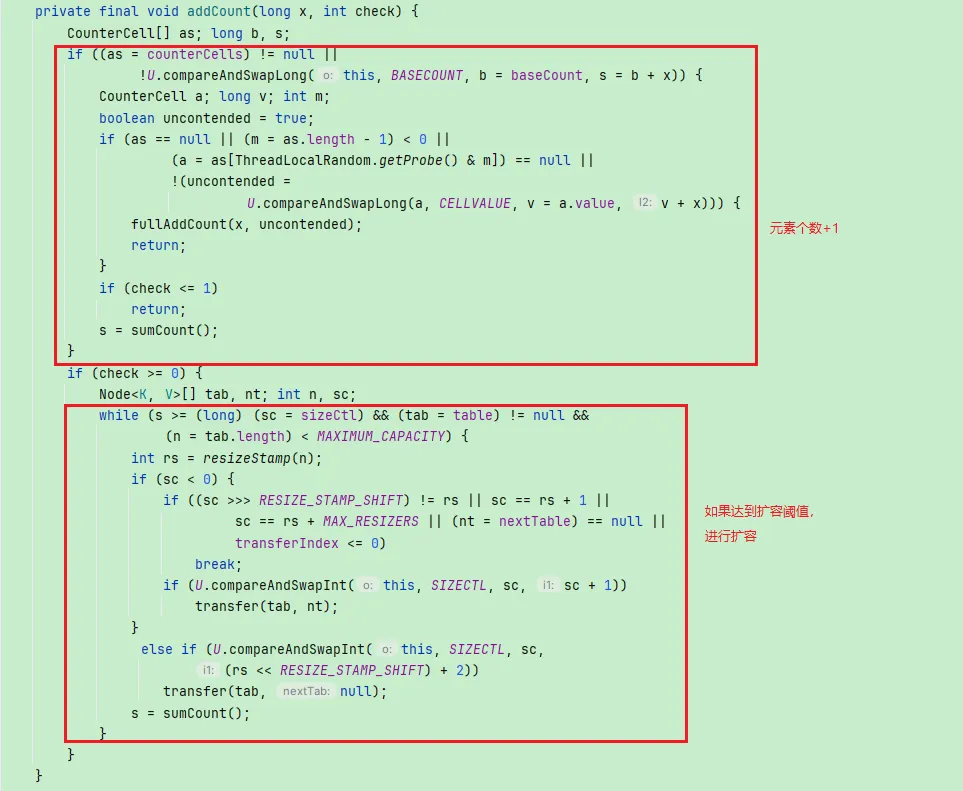
size

总结
CAS
初始化时用到,控制只有一个线程进行初始化
put时,如果数组下标上没有元素,通过cas进行设置,解决并发安全
更新元素个数时,采用分片+CAS更新个数的值
Synchronized
锁的是数组下标的元素,put的时候如果数组下标上已经有元素了,就会通过synchronized对该元素加锁
volatile
数组通过volatile修饰,保证可见性,虽然加了Synchronized,但是有些在Synchronized之外的操作是通过cas完成的